- HOME >
- ウェアラブルロボット >
- マッスルスーツ® 原理と特徴
マッスルスーツ® 原理と特徴
マッスルスーツ® 構造と動作原理
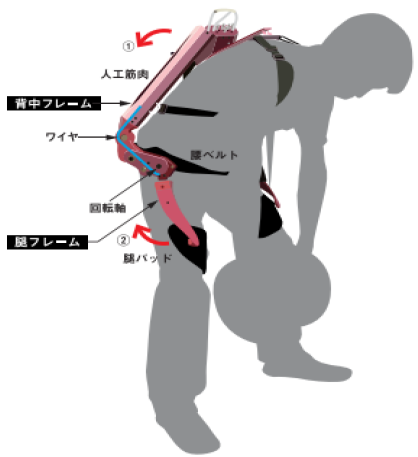
マッスルスーツ®背面の背中フレームは腿フレームの回転軸周りに回転できる構造です。
人工筋肉の一端は背中フレーム上部に固定され、他端にはワイヤが取り付けられています。ワイヤの他端は腿フレームの回転軸周りに設置された回転プーリに固定されています。
マッスルスーツ®の動作原理については、人工筋肉の収縮により腿フレームに固定されたワイヤが引っ張られ、左記①のように背中フレームが回転軸周りに回転し、上半身を起こします。その力の反力は、腿フレームを左記②のように回転させるので、腿パッドによりその回転を抑えます。
収縮力 → 回転力 → 反力 → 補助力の発生!
Mckibben型 人工筋肉
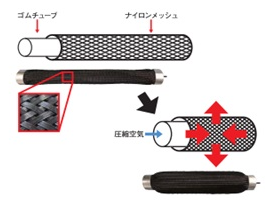
マッスルスーツ®に搭載されているMckibben型人工筋肉はゴムチューブを筒状のナイロンメッシュで包んで両端をかしめた構造。
ゴムチューブへの圧縮空気注入に伴うチューブの膨張が、ナイロンメッシュにより長さ方向の収縮を伴う強い引っ張り力に変換されます。
軽量かつ簡易構造で柔らかく、収縮のみの構造のため安全に使用することが可能です。(最大でも全長の30%程度の収縮)
マッスルスーツ®で使用している人工筋肉は、通常時直径1.5インチ200kgで、5気圧で最大150kgの引張力を発生させます。マッスルスーツ®の標準モデルでは4本、軽補助モデルでは2本使用。
マッスルスーツ®の特徴
《人工筋肉》

モーターは使わず、空気圧式の人工筋肉を使用。
構造的に安全かつ非常に強い収縮力を発生させ
る。
この収縮力を応用することで補助力を発生させ、
重量物の持ち上げ時にかかる腰への負担を大幅に
軽減します。
《股関節》

股関節も背骨も単純な軸ではなく、腰の曲がり方
は非常に複雑です。
マッスルスーツ®では、人間工学に基づく知識と
ノウハウにより、二軸を有する股関節機構を採用
しています。この股関節機構により、補助力をス
ムーズに着用者へ伝えることができます。
《対故障性》

コンプレッサやタンクから圧縮空気を人工筋肉
へ供給します。
マッスルスーツ®は標準タイプ:4本、軽補助
タイプ:2本の人工筋肉を採用しており、人工
筋肉の故障に対する危険を軽減しております。
《ももパット・フレーム》

腰補助では下半身に対して上半身を起こし、下半
身と上半身がまっすぐになるようにします。
上半身を起こす際の反力を受けるのがももパット
です。そして、ももフレームとの組み合わせによ
り、様々な姿勢に対応が可能です。
前傾姿勢でもしゃがんだ状態からでも、腰を使う
作業では腰への負担が軽減されます。
※マッスルスーツ®は㈱イノフィスの登録商標です。
![]()
東京都立川市曙町2-34-13 オリンピック第3ビル2F
TEL 042-541-3945(代) / FAX 042-541-0695
東京都立川市曙町2-34-13 オリンピック第3ビル2F
TEL 042-541-3945(代)
FAX 042-541-0695
![]()





